

Research
Passionate researcher in computer vision, Artificial Intelligence, machine learning, Robotics and Automation in a variety of interrelated areas,
-
3D Human Action recognition
-
Transformer network
-
Image and Video processing
-
Machine Learning & Artificial neural networks (CNN, ANN, SVM)
-
Control algorithms for Dynamic systems, robot manipulators
-
Mathematical modelling
-
Signal processing
Content
Some of the significant research contributes are presented as follows.
-
Elephant – Train Collision Prevention System
-
Modify the existing CNN architecture to achieve better Performance
-
Design a controller for Robot Manipulator
-
Active tactile sensor
-
Brain tumor identification and segmentation
-
Develop image and video codec using Huffman algorithm
-
Maximum power point tracking device
-
Ghost Guitar
1. Elephant – Train Collision Prevention System
Year : 2020 August (Graduate research- on going)

Objective: To develop an appropriate sensor unit and associated algorithms to detect the presence of elephants on or near the train track at an adequate distance. The sensor unit will consist of a Jetson Xavier Computing flatform, a Laser range finder, a wide-angle camera, an infra-red camera, and 3G/4G modem for mobile connection. This unit is powered using a Lithium-Ion battery pack which can be charged with solar power. We plan to leverage the capabilities of state of art Convolutional Neural Networks (CNNs) to process the incoming feed from the cameras to detect elephant presence both during the day and at night.
Abstract: A Reo Link IR night detection camera module was chosen as the sensor unit and the YOLO3 Darknet model was used for the detection purpose. A custom data set was collected and the transfer learning method was applied using YOLO3 weights. Then an alert signal will be transmitted to the train driver and near railway stations when an elephant detects on the railway track.
Grant:
-
The Special Interest Group of Humanitarian Technologies (SIGHT) of the Robotics and Automation Society (RAS) of the Institute of Electrical and Electronics Engineers (IEEE), USA.
Research Group members:
Prof. Lilantha Samaranayake (University of Peradeniya, Sri Lanka).
Prof. Kithsiri M. Liyanage (University of Peradeniya, Sri Lanka).
Dr. Nalin Harischandra (University of Peradeniya, Sri Lanka).
Dr. Tharindu Weerakoon (University of Peradeniya, Sri Lanka).
Dr. Parakrama Ekanayake (University of Peradeniya, Sri Lanka).
Prof Gamini Dissanayake (UTS, Australia)
Dr. Ravindra Ranasinghe (UTS, Australia)
Mr. Maleen Jayasuriya (UTS, Australia)
2. Modify the existing CNN architecture to achieve better Performance
Year : 2020 February (Graduate research)
Objective : CNN (Convolutional neural network) is one of the main machine learning algorithms used in image classification and object localization in computer vision. It has developed through out last decades. But still, it takes much time to train, and also it has a huge computational cost when the network becomes large. We try to modify the existing CNN architecture to achieve better performance in terms of computational cost and accuracy.
Abstract: Training deep neural networks was traditionally challenging as the vanishing gradient meant that weights in layers close to the input layer were not updated in response to errors calculated on the training dataset. We try to develop cascade layer-wise training architecture to reduce the computational cost as well as to overcome the vanishing gradient problem. This research is still in the initial state (by doing a literature review and testing a few
models).
Research Group members:
Prof Maheesan Niranjan (Southampton University, UK)
Dr. Maheshi B Dissanayake (University of Peradeniya, Sri Lanka)

3. Design a controller for Robot Manipulator

Year : 2019/20 (Graduate research)
Objective: To develop a complete mathematical model for a 5DOF robot manipulator using forward and inverse kinematics.
To implement a then decoupling control system for the robot to increase the smoothness and efficiency
Abstract: Puma 560 is a 6DOF (degree of freedom) robot manipulator which is commercially available. The initial task is to use reverse engineering techniques and develop a complete mathematical model for the robot using forward and inverse kinematics. A mathematical model for the robot was developed in both forward and inverse kinematics. It is needed to implement individual joint controllers for all five joints of the robot and then decoupling control system for the robot to increase the smoothness and efficiency of the robot. This model was tested in MatLab Simulink using simmechnics models successfully. This project was sponsored by GPV Lanka Pvt ltd
Research Group members :
Prof. Lilantha Samaranayake.
Dr. Nalin Harischandra.
4.Active tactile sensor
Year: 2018/19 (Undergraduate research)
Objective:
To develop an algorithm to increase the accuracy of the existing methods.
Compare the ANN(Artificial Neural network ) and SVM (Support Vector Machine)
performance.
To identify the reasons for abnormal behaviour at the tip of the antenna and suggest
a solution.
Abstract: Walking animals are the fully autonomous creatures of the nature which are highly adaptive in object detection and localization using their sensitive sensors. Tactile sensors are used as a near range sensing elements by most of the animals, which the information arising from physical interaction with their near range environment are measured. Many animals carry actively movable tactile sensors on their heads to explore the near-range space. During locomotion, antenna is involved in near range orientation, for example in detecting, localizing, probing, and negotiating obstacles. A bionic tactile sensor used here was
inspired by the antenna of the stick insects. The sensor is able to detect an obstacle and its location in 3D (Three dimensional) space. Antenna probe should be a structure, similar to a beam, vibration-sensitive and compliant but also stiff enough to maintain its shape during self-vibration, The antenna beam should be soft enough, not to make any damage on the obstacle, as a small hit was given to the obstacle while detecting the obstacles and collecting data. An accelerometer sensor (MPU6050) was mounted at the tip of the antenna to collect the vibration data. A Raspberry pi3TM controlling board was used as the main control unit of the robot. All the motor controller signals, data acquisitions and machine learning models were run inside this raspberry pi board. Python was used as the coding language. The vibration signals were analysed in the frequency domain using Fast Fourier Transform (FFT) to estimate the distances. Some signal processing algorithms, Artificial Neural Network (ANN) and Support Vector Machine (SVM) was used for the analysing and prediction process. These three prediction techniques were compared in both distance estimation and material classification processes. When estimating the distances, the accuracy of estimation was deteriorated towards the tip of the probe due to the change in vibration modes. Since the vibration data within that region have high variance, the accuracy in distance estimation and material classification was lower towards the tip. The antenna probe was modelled mathematically by using Euler- Bernoulli beam element theories and found that there is a vibration mode change occurred towards the antenna tip and multiple vibration modes were appear. After proving it mathematically, it was verified by using experimental data as well. To analyse vibration mode changes it is needed to have time, frequency and amplitude data of the vibration signal. As the Fourier transform doesn’t give the time information, Wavelet transform-based algorithms were used to analyse.
Research Group members :
HNTK Kaldera
Prof. Lilantha Samaranayake.
Dr. Nalin Harischandra.


Achievements:
-
We proposed a robotic solution for the metal garbage classification using a developed active tactile sensing antenna (METABOT- MEtal TActile roBOT ) and we were able to be the champions of IEEE R10 Asia pacific humanitarian robotic challenge 2018.
-
Research was recognized as one of the best electrical and electronic undergraduate projects in Sri Lanka by IESL (Institution of Engineers, Sri Lanka).
-
Selected among the best five undergraduate researches in the Department of electrical and electronic engineering, Faculty of Engineering, University of Peradeniya.
5. Brain tumor identification and segmentation


Year: 2018/19
Objective : To develop a new machine-learning algorithm to classify, localize and segmentation of brain tumours using MRI images with low computational cost and to conduct a subjective quality evaluation for tumour localization and segmentation.
Abstract: Primary brain tumours can be malignant (cancerous) or benign (non-cancerous). Out of primary brain tumours, gliomas are the most common and, high-grade gliomas carry a poor prognosis. In this study, the problem of fully automated brain tumour classification and segmentation, in Magnetic resonance imaging (MRI) containing both Glioma and Meningioma types of brain tumours are considered. This research proposes a Convolutional Neural Network (CNN), for classification problems and a Faster Region-based Convolutional Neural Network (Faster R-CNN) and edge detection techniques in image processing algorithms for segmentation problems with a reduced number of computations with a higher accuracy level. This research has used 218 images as a training set and the systems show an accuracy of 100% in Meningioma and 87.5% in Glioma classifications and an average confidence level of more than 94% in segmentation of Meningioma and Glioma tumours. Further, analysis shows that with the proposed technique it is possible to achieve an average detection accuracy, sensitivity, Dice score and confidence level of 99.81%, 87.72%, 91.14% and 93.6% respectively. A subjective quality evaluation has been done with the collaboration of Neurologists, Medical officers (MO) and Intern home officers (HO) and this was
conducted according to the ITU- recommendations.
Research Group members:
HNTK Kaldera
Dr. Maheshi B Dissanayake
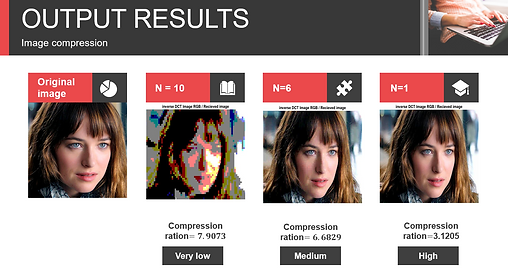
6. Develop image and video codec using Huffman algorithm
Year: 2018 (Individual research for EE596 Image and Video Coding subject)
Objective: Develop a Huffman algorithm to compress images. Develop an encoder and a decoder for video transmission using the developed Huffman algorithm.
Abstract: Hybrid video coding is an advanced coding technique that is derived from both predictive coding and transform coding. Hybrid video coding framework is commonly used in modern video coding standards, e.g., H.26x, MPEG2/4, AVS, HEVC, etc. In this project, implemented a simplified hybrid video codec with coding tools like discrete cosine transformation, quantization, prediction, and entropy coding. Here Huffman algorithm was developed by myself and it was used as the entropy coding technique. As the initial step, an image was coded using the Huffman algorithm for all 3 layers and decoded successfully and compare the quality of the image for different quantization levels. Then YUV video was encoded and decoded successfully with macro block-based coding, basic motion estimation and intra prediction algorithms. Optimized the quantization process of the codec to facilitate transmission in a fixed bandwidth environment. You may use an optimization analysis to find the best QP to meet the given bit rate. the entire project was done by using MATLAB.
Research Group members :
Dr Maheshi B Dissanayake.
7. Maximum power point tracking device
Year: 2017 ( 3rd Year Mini research project)
Objective: Develop an algorithm based on perturb and observe (P&O) method to maximize the PV array output power
Abstract: Tracking the Maximum Power Point (MPP) of a Photovoltaic (PV) array is very difficult due to the nonlinearity of its I-V characteristic, which is dependent on temperature and irradiation conditions. Propose a method which is modified using perturb and observe (P&O) method to maximize the PV array output power. When the operating point converge to the optimum point using the existing P&O method, the operating point will not be able to stay at the optimum point, it is always oscillating around that point. The proposed method is based on the adaptive delta modulation techniques and that algorithm was able to reduce the oscillation about the optimum point. In this method, the PV array output is used to direct control the DC/DC converter, reducing the complexity of the system. After read the solar panel voltage, solar panel current, output power of the panel and battery voltage were transmitted to the main board using UART (Universal Asynchronous Receiver/Transmitter) serial communication. There we developed a new communication protocol to transmit data; in serial communication one byte was sent (8 bits) at a time and the high nibble of the bite (1st 4 bits) was used as the tags and the low nibble (2nd 4 bits) was used as the data value.
Achievements:
A conference paper was published in IET present around the world technical conference 2018 in the University of Moratuwa and able to win third place for best paper presenter category.
Research Group members :
NMS Silva
WALH Wickramanayake


8. Ghost Guitar
Year: 2017 - Access Hackathon
Objective: Design a device which can plug in to a any guitar to play guitar using a single hand
Abstract: There may be many people who have a single hand and still love to play the guitar. This device is designed for such a person. It is able to play any strumming pattern with given user input and the player only need to change the codes by using a single hand
Research Group members :
NMS Silva
RT Munasinghe
